PLOT: Pseudo-Labeling via Object Tracking for Monocular 3D Object Detection
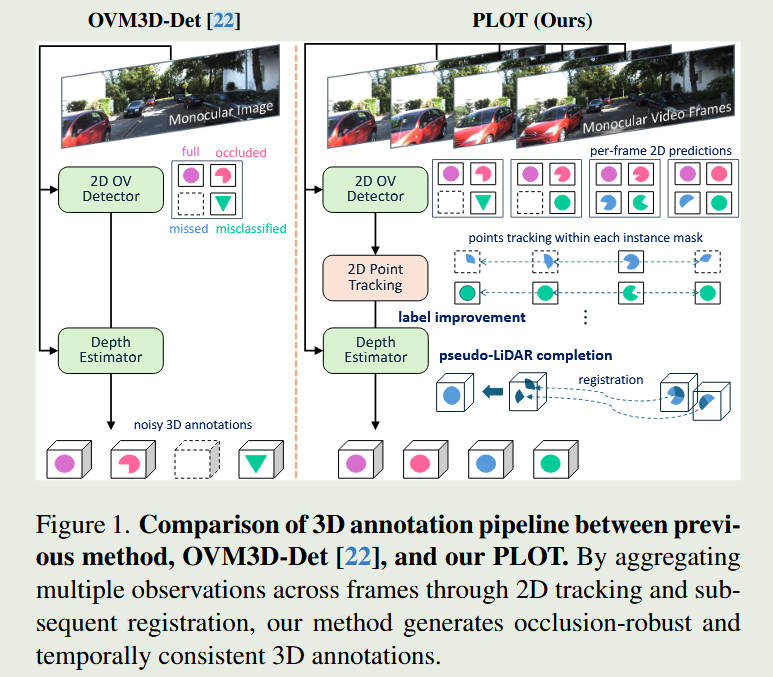
🏛️ 会议/期刊:ICLR 📅 发表年份:2026 💻 开源代码:无 📄 论文题目:PLOT: Pseudo-Labeling via Object Tracking for Monocular 3D Object Detection 一、 背景、研究目的与核心问题 研究背景: 单目 3D 目标检测模型极度“吃数据”。然而,人工标注 3D 边界框极其昂贵且耗时,导致目前带 3D 标签的数据集规模很小,严重限制了模型的泛化能力。 ...