Perception & Reconstruction
从二维像素中逆推三维世界,在不确定的噪声里寻找确定的特征。这里记录关于深度学习、空间感知与代码的折腾日常。
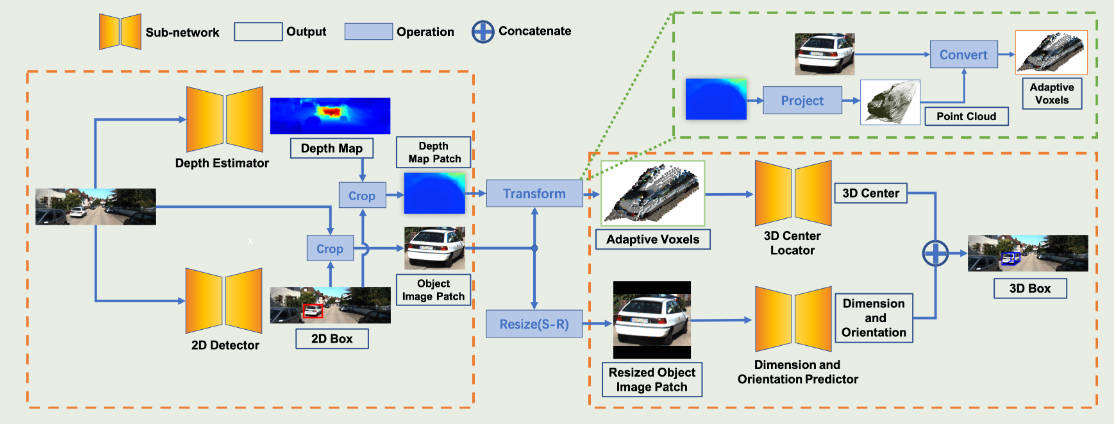
🏛️ 会议/期刊:arxiv 📅 发表年份:2021 💻 开源代码:OBMO_GUPNet 📄 论文题目:OCM3D: Object-Centric Monocular 3D Object Detection 1. 文献背景、研究目的与核心问题 研究背景:单目 3D 目标检测(Monocular 3D Object Detection)是一个高度病态(ill-posed)的问题。主流方法通常依赖纯图像或将其转化为伪激光雷达(Pseudo-LiDAR)点云。然而,前者难以捕捉像素间的 3D 空间几何关系,后者则受困于单目深度估计带来的巨大点云噪声。 ...
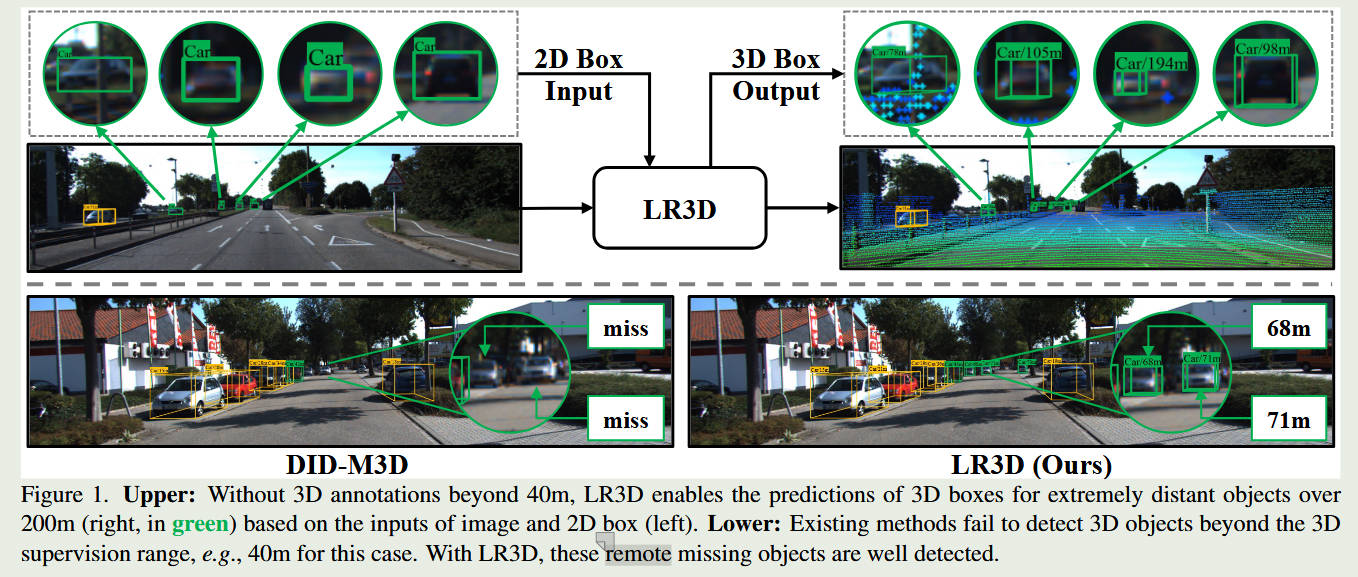
🏛️ 会议/期刊:CVPR 📅 发表年份:2024 💻 开源代码:无 📄 论文题目:Improving Distant 3D Object Detection Using 2D Box Supervision 这篇由 NVIDIA 等机构的研究人员发表在 CVPR 2024 的重磅论文 《Improving Distant 3D Object Detection Using 2D Box Supervision》(简称 LR3D),切入了一个目前高阶自动驾驶极其头疼的落地难题:远距离感知(Long-Range Detection)。它展示了如何用最廉价的标注,榨取单目视觉在远距离上的极限潜力。 ...
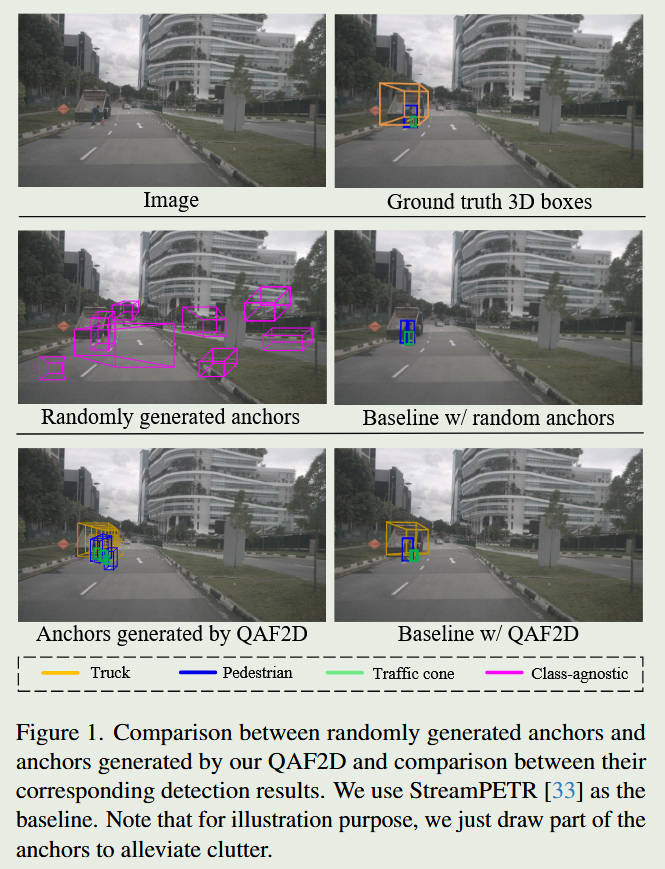
🏛️ 会议/期刊:CVPR 📅 发表年份:2024 💻 开源代码:nullmax-vision/QAF2D-CVPR 2024 📄 论文题目:Enhancing 3D Object Detection with 2D Detection-Guided Query Anchors 这篇发表于 CVPR 2024 的论文 《Enhancing 3D Object Detection with 2D Detection-Guided Query Anchors》(简称 QAF2D) 极具工程实用价值。它没有死磕 3D 空间中的特征提取瓶颈,而是打出了一套极其聪明的“降维组合拳”,巧妙地利用成熟的 2D 视觉技术来为 3D 检测器“引路”。 ...
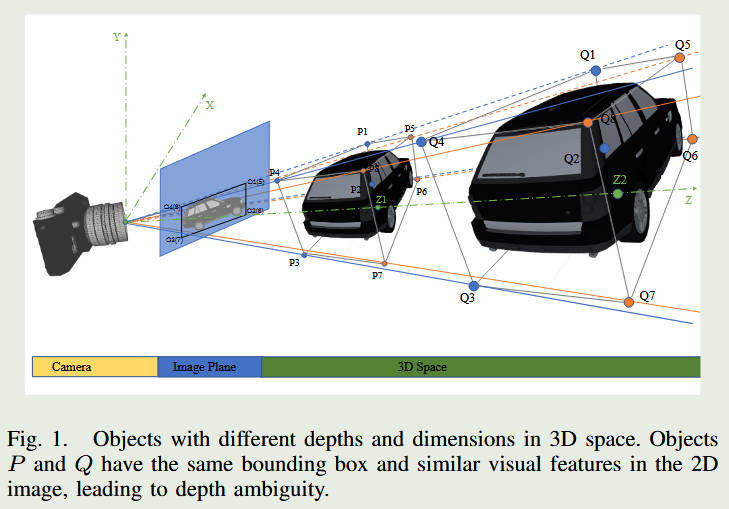
🏛️ 会议/期刊:IEEE TIP 📅 发表年份:2023 💻 开源代码:mrsempress/OBMO_patchnet 📄 论文题目:OBMO: One Bounding Box Multiple Objects for Monocular 3D Object Detection 这篇发表于 IEEE TIP (2023) 的经典论文 《OBMO: One Bounding Box Multiple Objects for Monocular 3D Object Detection》 切入点非常犀利。它没有在复杂的网络主干上做文章,而是直击单目 3D 目标检测在“底层数学物理逻辑”上的痛点,提出了一种极其优雅的“即插即用(Plug-and-play)”训练策略。 ...
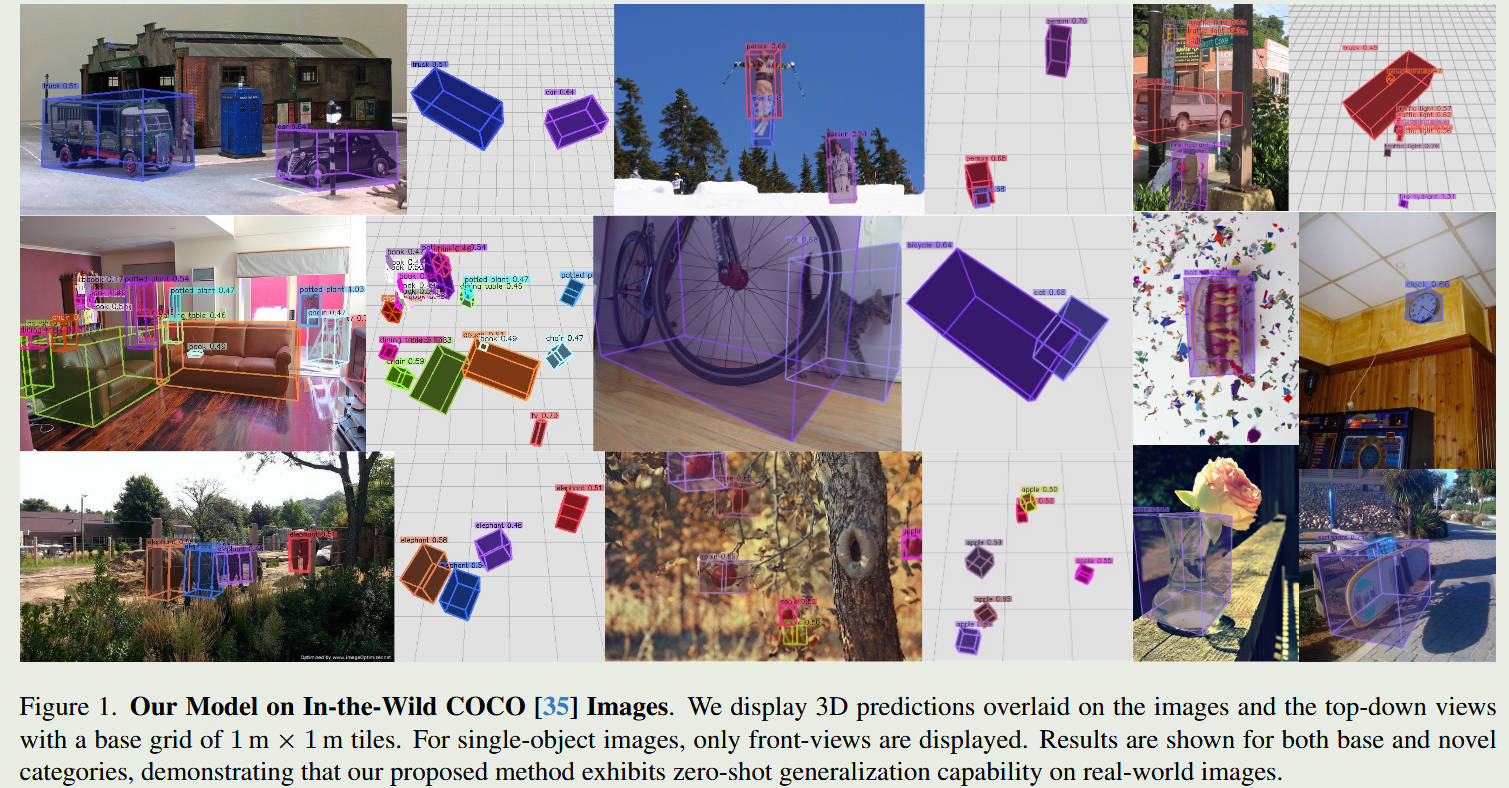
🏛️ 会议/期刊:3DV 📅 发表年份:2026 💻 开源代码:UVA-Computer-Vision-Lab/ovmono3d 📄 论文题目:Open Vocabulary Monocular 3D Object Detection 一、 背景、研究目的与核心问题 研究背景: 传统的单目 3D 目标检测(M3OD)模型都属于“闭集(Closed-set)”学习。这意味着模型只能检测训练集中预先定义好的那几种类别(例如 KITTI 数据集里的车、人、自行车)。但在真实的自动驾驶或机器人场景中,会遇到无数的长尾目标(如遗落的轮胎、奇形怪状的施工路障、甚至是一只突然窜出的动物)。 ...
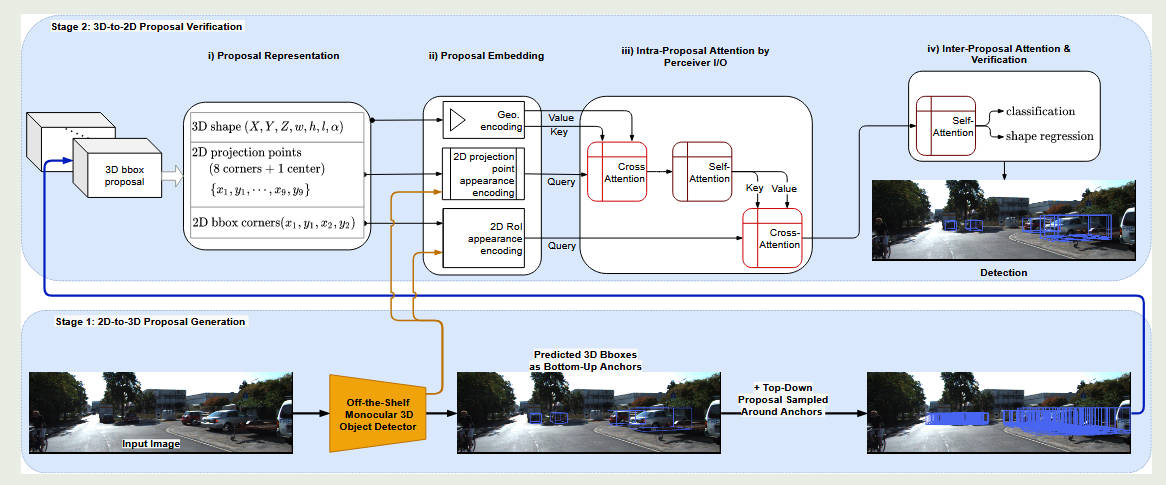
🏛️ 会议/期刊:ICCV 📅 发表年份:2023 💻 开源代码:Xianpeng919/monoxiver (ICCV'23) 📄 论文题目:Monocular 3D Object Detection with Bounding Box Denoising in 3D by Perceiver 这篇发表于 ICCV 2023 的论文 《Monocular 3D Object Detection with Bounding Box Denoising in 3D by Perceiver》(简称 MonoXiver),提供了一个非常经典且极具工程价值的“自上而下(Top-down)”纠错思路。它并没有试图发明一种全新的主干网络,而是设计了一个强大的“插件”,专门用来拯救那些定位不准的预测框。 ...