SpikeSMOKE: Spiking Neural Networks for Monocular 3D Object Detection with Cross-Scale Gated Coding

🏛️ 会议/期刊:CVPR / ICCV / ECCV
📅 发表年份:2026
💻 开源代码:无
📄 论文题目:SpikeSMOKE: Spiking Neural Networks for Monocular 3D Object Detection with Cross-Scale Gated Coding
一、 背景、研究目的与核心问题
-
研究背景: 在自动驾驶等领域,3D 目标检测是核心技术。其中,“单目 3D 目标检测”由于仅依赖单张图像,硬件成本极低,备受青睐。然而,传统基于人工神经网络(ANNs)的模型计算量大、能耗极高,给边缘计算设备的电池续航和散热带来了巨大压力。
-
研究目的: 旨在开发一种兼顾“高精度”与“极低功耗”的单目 3D 目标检测架构。
-
核心问题(痛点): 脉冲神经网络(SNNs)由于具有事件驱动的特性,功耗极低,是解决能耗问题的完美候选。但是,SNN 使用的是离散的二值脉冲信号(0或1),而传统的 ANN 使用的是连续的浮点数。当把 ANN 转换为 SNN 时,这种信号的强行“离散化”会产生严重的信息丢失(Information Loss),导致特征表达能力急剧下降,进而拖累检测精度。
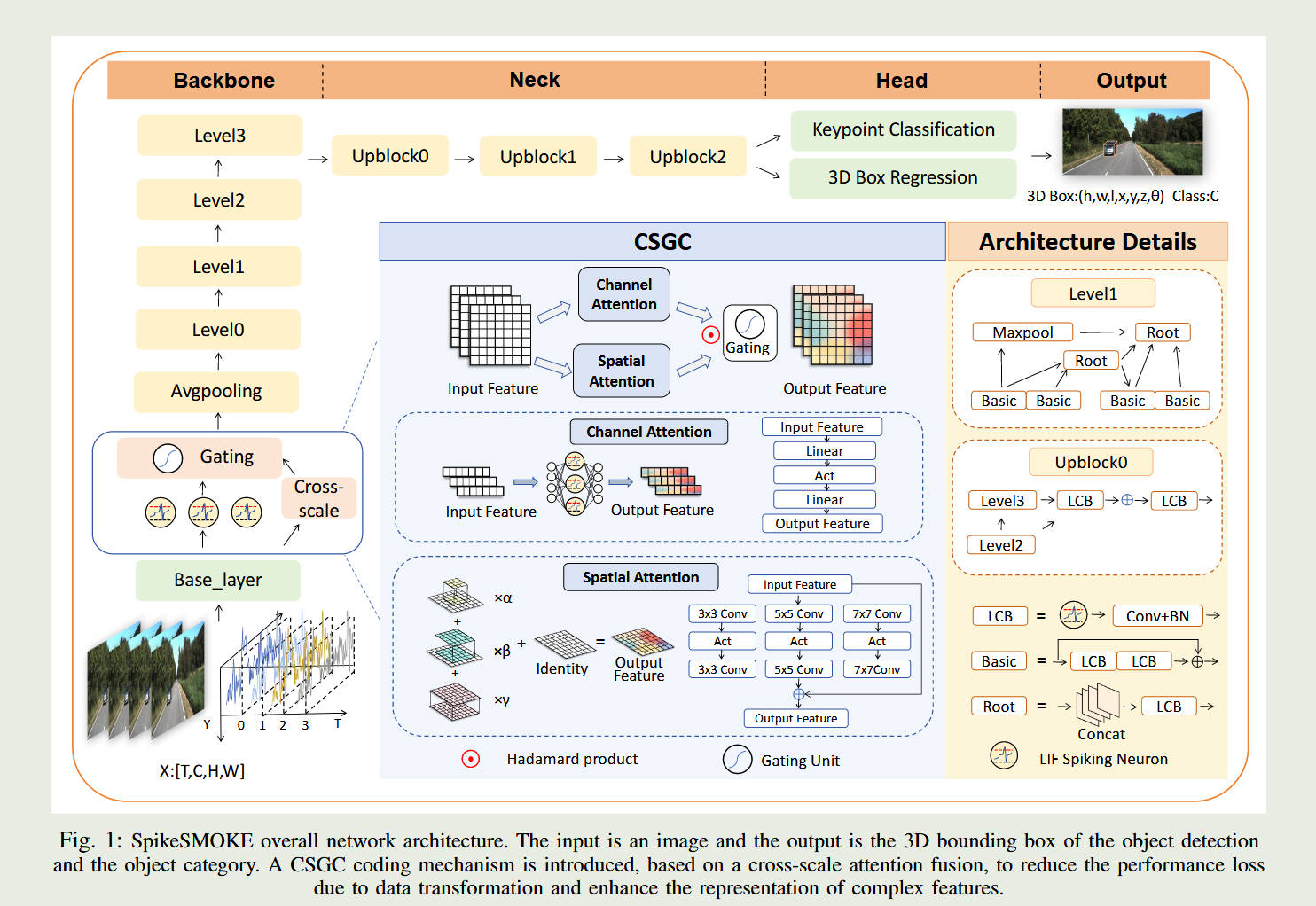
整体框架图
二、 研究方法、关键数据与结论
1. 研究方法
为了解决上述痛点,作者提出了 SpikeSMOKE 架构,这是一种基于经典单阶段无锚框模型(SMOKE)改造而来的全脉冲化网络:
-
全链路脉冲化: 将原版 SMOKE 的主干网络(DLA34)、颈部(Neck)和检测头(Head)全部转换为 SNN 范式。具体来说,利用 LIF(Leaky Integrate-and-Fire)神经元的脉冲发射率来模拟原有的 ReLU 激活函数,构建了 Spike-DLA34。
-
跨尺度门控编码机制(CSGC): 这是本文的核心创新点。为了弥补离散信号带来的信息丢失,作者受生物神经元突触滤波机制的启发,设计了 CSGC。该机制融合了跨尺度的注意力特征,并加入了一个门控过滤单元,用于在信息传递时进行动态筛选和增强。
-
轻量化设计: 作者还提出了一种轻量级的残差块,构建了 SpikeSMOKE-L 版本,进一步压缩模型。
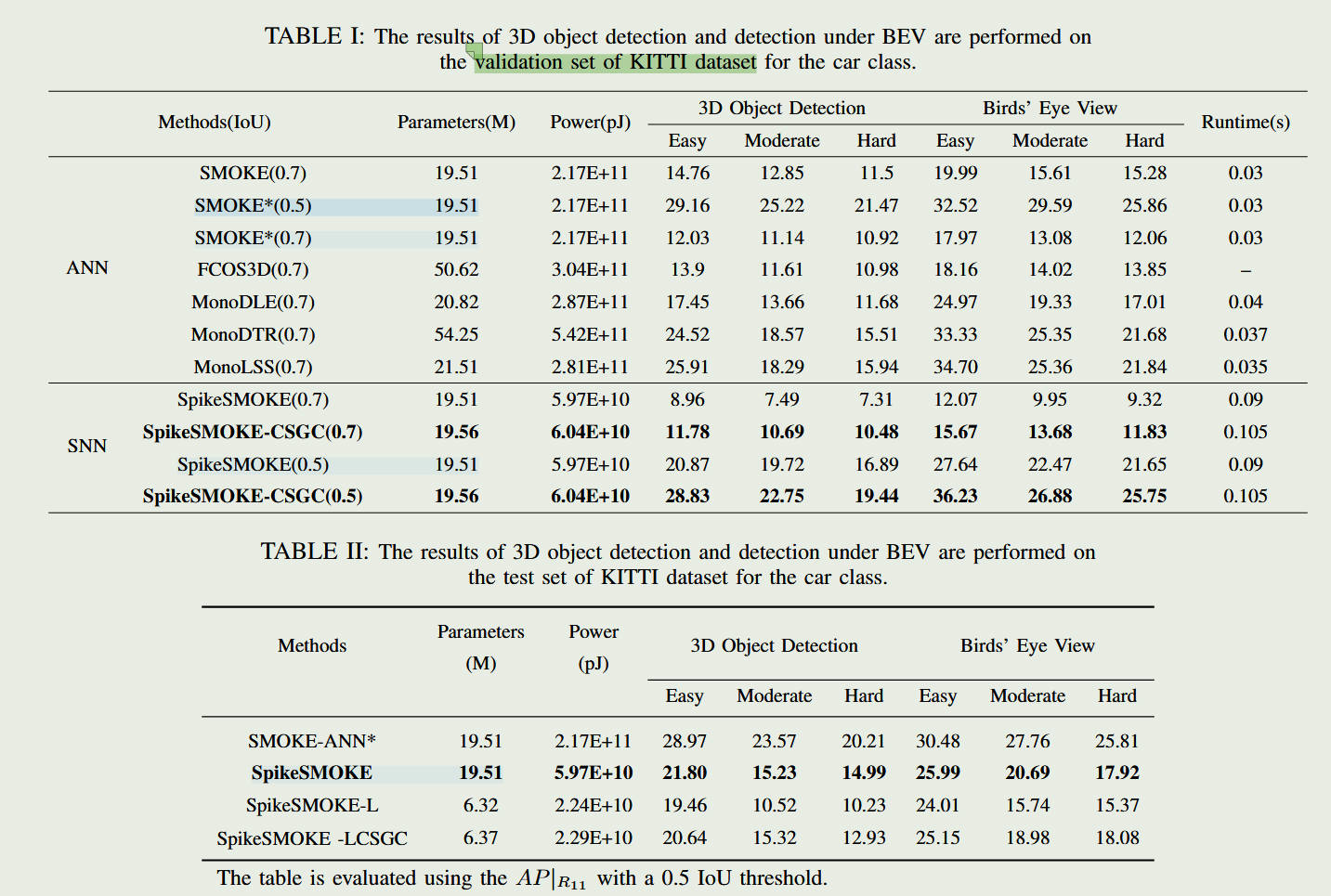
结果对比
2. 关键数据与主要发现
-
极致的能效比: 在 KITTI 自动驾驶数据集上,与传统的 ANN 版本相比,SpikeSMOKE 在“Hard”难度类别下,能耗惊人地降低了 72.2%,而检测性能仅仅下降了 4%。
-
CSGC 的显著增益: 引入 CSGC 机制后,SpikeSMOKE 在 KITTI 数据集上的表现大幅提升,在 Easy、Moderate 和 Hard 难度下分别提升了 2.82、3.2 和 3.17 个 AP(平均精度)。
-
极致轻量化: 轻量级版本 SpikeSMOKE-L 相比原版网络,参数量减少了 3 倍,计算量骤降了 10 倍。
-
泛化能力: CSGC 机制不仅在 3D 检测中有效,在 CIFAR-10/100 图像分类任务上也验证了其有效性。
3. 结论
研究证明,将低功耗的 SNN 应用于复杂的单目 3D 目标检测任务是完全可行的。通过引入仿生的跨尺度门控机制(CSGC),可以有效弥合离散脉冲信号带来的特征表达鸿沟,在几乎不损失精度的前提下,实现了颠覆性的功耗缩减。
三、 新颖概念通俗解释
为了更好理解这篇论文,我们可以这样拆解其中的两个硬核概念:
-
脉冲神经网络 (Spiking Neural Networks, SNNs): 传统的神经网络(ANN)传递信息就像是“调光开关”,亮度是连续变化的(比如 0.82、0.45)。而 SNN 模仿了真实人类大脑的工作方式,它传递信息更像是“按电灯开关”(只有开和关,也就是 1 和 0 的脉冲)。只有当神经元累积的刺激达到一定阈值时,它才会“发射”一个脉冲。因为大部分时间神经元都处于“静默”状态,只有需要时才工作(事件驱动),所以它极其省电。
-
跨尺度门控编码 (Cross-Scale Gated Coding, CSGC):
因为 SNN 把丰富连续的图像信息变成了“0和1”,就像把高清电影变成了像素风马赛克,必然会丢掉很多细节。CSGC 就像是一个带有“智能滤镜的保安系统”。“跨尺度”意味着它同时查看图像的大轮廓和小细节;“门控编码”则是模仿大脑突触,评估这些 0和1 的脉冲到底重不重要。重要的脉冲放行,无意义的噪声阻挡,从而把被“马赛克化”的信息重新提炼得清晰锐利。
四、 优缺点客观评价与后续研究方向
优点:
-
直击行业痛点: 敏锐地抓住了车载计算平台“算力与功耗”的矛盾,从底层网络架构(SNN)出发解决问题,而非单纯的软件压缩。
-
创新性强: 将生物突触机制(CSGC)巧妙引入三维视觉任务,优雅地解决了 SNN 中最棘手的“离散信号特征表达弱”的难题。
-
极具性价比: 牺牲极小精度(4%)换取巨大能耗收益(72%),在工程落地(特别是算力受限的无人机、小型机器人上)极具吸引力。
缺点与局限性:
-
绝对精度的天花板: 尽管只下降了 4%,但在自动驾驶这种对安全容错率为零的场景中,任何精度的倒退都需要极为谨慎的权衡。
-
基线模型较老: 论文基于的 SMOKE 架构虽然经典,但在单目 3D 检测领域已不算最前沿(例如目前许多基于 Transformer 或 BEV 视角的模型表现更好),在更先进架构上 SNN 能否保持这种优势尚待验证。
-
硬件验证缺失: 论文的能耗数据大多基于理论计算或软件模拟,SNN 的真正威力需要部署在专用的神经形态芯片(如 Intel Loihi)上才能完美释放,这方面缺乏实机测试。
可能的后续研究方向:
-
结合更先进的 3D 检测范式: 探索如何将 Transformer 或多视角(Multi-view)单目 3D 检测技术进行“脉冲化”。
-
软硬协同优化: 将 SpikeSMOKE 部署至真实的神经形态硬件(Neuromorphic Hardware)上,进行端到端的延迟与实测功耗分析。
-
动态环境下的鲁棒性研究: SNN 在处理高动态模糊、恶劣天气等连续时间戳数据时具有天然优势,结合事件相机(Event Camera)数据进行多模态 3D 检测将是极具潜力的方向。