OCM3D: Object-Centric Monocular 3D Object Detection

🏛️ 会议/期刊:arxiv
📅 发表年份:2021
💻 开源代码:OBMO_GUPNet
📄 论文题目:OCM3D: Object-Centric Monocular 3D Object Detection
1. 文献背景、研究目的与核心问题
-
研究背景:单目 3D 目标检测(Monocular 3D Object Detection)是一个高度病态(ill-posed)的问题。主流方法通常依赖纯图像或将其转化为伪激光雷达(Pseudo-LiDAR)点云。然而,前者难以捕捉像素间的 3D 空间几何关系,后者则受困于单目深度估计带来的巨大点云噪声。
-
研究目的:提出一种以物体为中心(Object-Centric)的单目 3D 检测框架(OCM3D),通过局部自适应表示来过滤噪声并精确定位。
-
核心痛点:对于基于 2D 检测器的 3D 方法,网络很难在没有显式标签的情况下学习到真正的“3D 置信度”。很多模型直接将 2D 框的置信度照搬为 3D 置信度,导致模型对那些“2D 识别准确,但 3D 深度预测错误”的样本过度自信。
2. 研究方法、关键数据与主要发现
-
自适应体素表示(Adaptive Voxel Representation):有别于在全局场景中构建体素,OCM3D 直接在每个物体的 2D 候选框(Proposal)上构建局部体素。体素的尺寸由 3D 点的空间分布自适应决定,从而有效地将带有严重噪声的伪点云组织起来。
-
局部特征提取:摒弃了从整张图或全局点云中提取方向特征的做法,转而通过调整尺寸的图像块(Image Patch)提取局部 RoI 信息,排除了背景干扰。
-
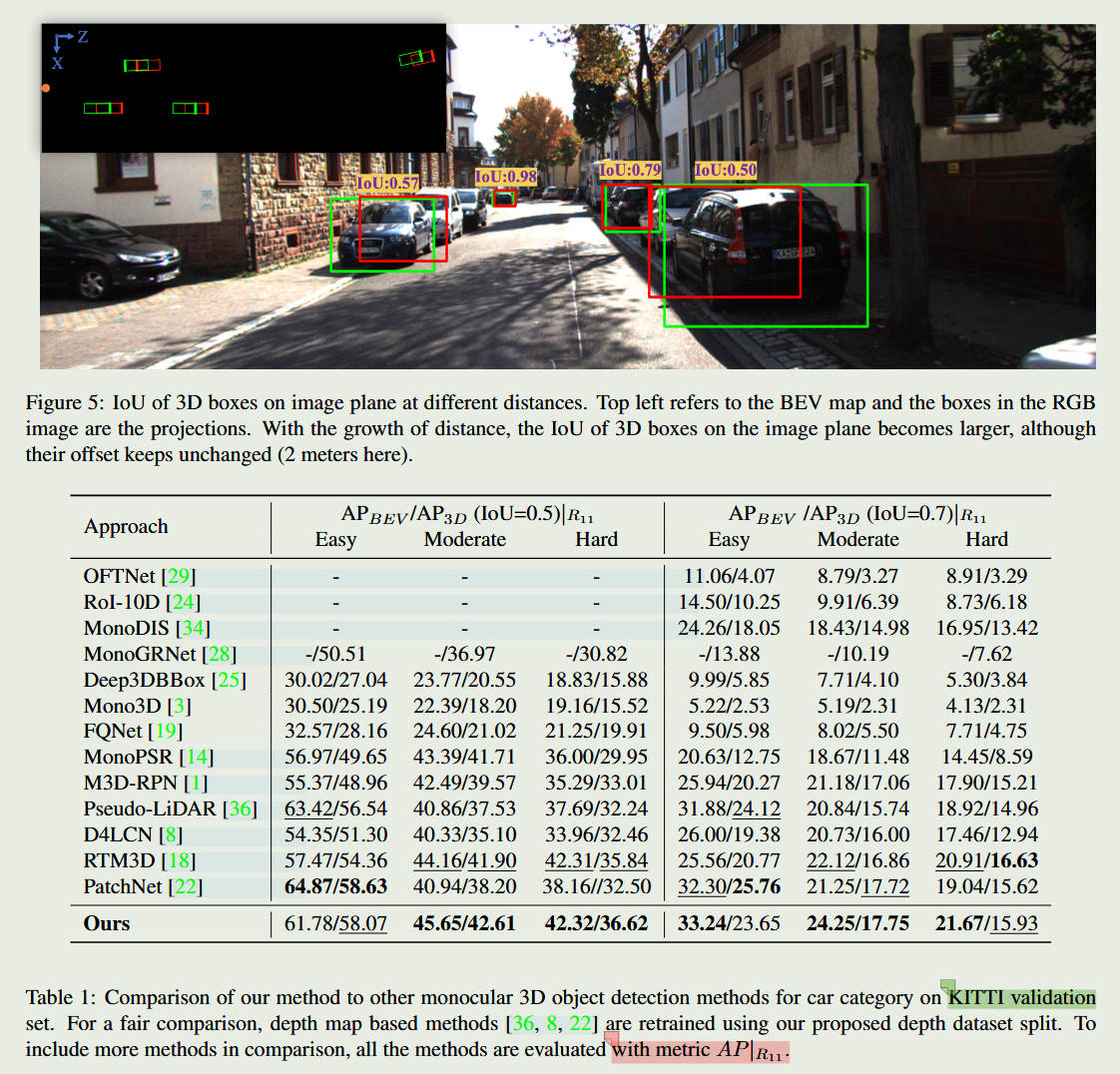
主要发现:在 KITTI 数据集上,该方法大幅超越了当时的技术基准,证明了抛弃全局盲目回归,转而采用“以物体为中心”的局部几何建模能显著提升定位的鲁棒性。
整体框架图
3. 核心概念剖析:3.4 节 (Decomposed 3D Detection Confidence)
这是论文提升检测指标的最核心机制之一。在自动驾驶中,网络输出的“得分”直接影响非极大值抑制(NMS)和最终决策。如果借用 2D 置信度,即使系统 100% 确认画面里有一辆车,也无法保证它估算的 3D 距离是准确的。
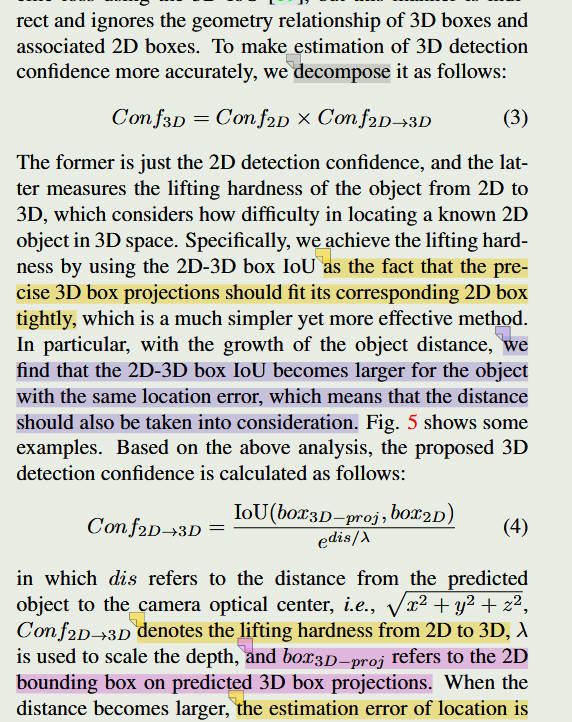
为此,作者提出将最终的 3D 置信度 $C_{3D}$ 解耦(Decompose) 为两个独立的部分:
-
2D 检测置信度 ($C_{2D}$):这代表模型在图像平面上识别该物体的确定性(比如有多大把握确认这是一个行人或一辆车)。这可以直接从 2D 检测头获取。
-
2D 到 3D 的提升难度 (Lifting Hardness):这代表从 2D 平面推导到 3D 立体空间的几何契合度。
通俗解释:
想象你隔着窗户(2D 图像平面)看着外面的一辆车,需要推测它的真实立体尺寸和距离(3D 边界框)。
-
首先,你很确定眼前是一辆车,所以 $C_{2D}$ 得分很高。
-
接着,你在脑海中构建了一个带有距离的 3D 立体车辆模型,并把它透视投影回窗户玻璃上。
-
一致性验证:如果这个玻璃上的“3D 投影框”与你肉眼看到的“真实 2D 轮廓”严丝合缝,说明你的 3D 推理在物理几何上是高度自洽的(Lifting Hardness 低,几何得分高);如果投影出现了严重的边缘错位,说明你的深度或姿态预测出了偏差,此时无论 2D 识别多自信,整体的 3D 置信度 $C_{3D}$ 都必须受到惩罚并降低。
4. 客观评价与未来研究方向
优点:
-
抗噪性强:以物体为中心的局部体素化,巧妙避开了单目深度估计在背景和远景处产生的灾难性噪声。
-
物理可解释性高:置信度解耦的设计赋予了网络显式的几何约束,使得输出分数能真实反映 3D 定位质量,有效减少了高分误报(False Positives)。
缺点:
-
强依赖 2D 检测质量:由于后续的所有 3D 构建和置信度计算都基于 2D 框,一旦 2D 框因为遮挡出现截断或像素级漂移,误差会被直接放大到 3D 预测中。
-
缺乏全局视野:纯粹的“以物体为中心”割裂了场景中物体与物体、物体与环境之间的相对关系。
后续研究方向探讨:
-
引入场景拓扑正则化 (Scene Topological Regularization):单靠单体对象的 2D-3D 投影一致性仍显单薄。可以探索引入场景中多个目标之间的拓扑关系进行正则化约束,从全局的视角校准局部深度,弥补 Object-Centric 带来的视野局限。
-
多粒度特征恢复 (Multi-Granularity Feature Restoration):针对局部 RoI 中由于遮挡导致的语义丢失,可以在特征层面进行不同粒度(从粗略轮廓到细粒度纹理)的特征恢复,以提升复杂场景下的检测精度。