Adaptive Dual Uncertainty Optimization: Boosting Monocular 3D Object Detection under Test Time Shifts

🌟 一、 论文速览 (Executive Summary)
-
研究背景与痛点:单目3D目标检测(M3OD)在自动驾驶等关键任务中极具应用潜力,但在实际部署中,由于环境变化或传感器差异带来的测试时偏移(Test-Time Shifts),模型性能往往会断崖式下跌。现有的测试时自适应(TTA)方法虽然能缓解分布偏移,但大多忽略了 M3OD 任务中特有的“双重致命缺陷”:语义不确定性(类别预测模糊)和几何不确定性(空间定位极其不稳定)。
-
研究目的与核心贡献:本文提出了一种全新的测试时自适应框架——双重不确定性优化 (DUO, Dual Uncertainty Optimization),旨在联合最小化语义与几何不确定性,全面提升 M3OD 模型在未知分布下的鲁棒性。
-
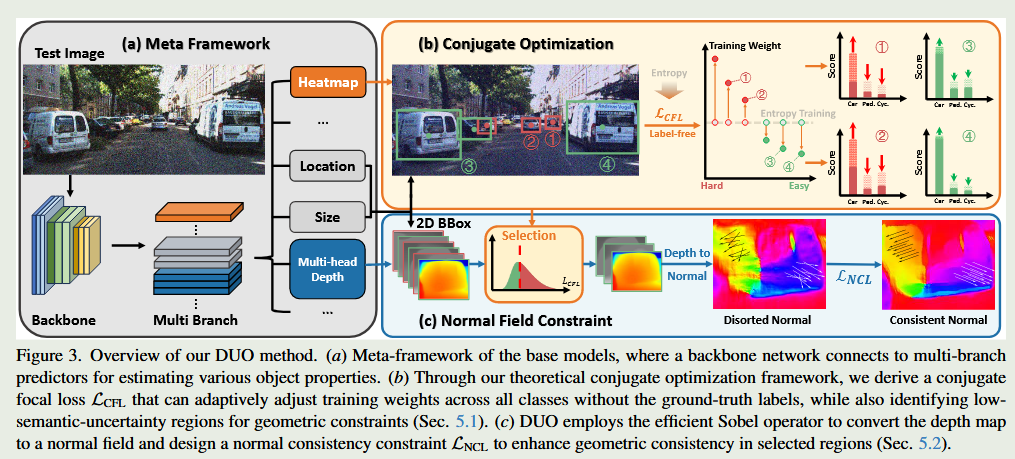
核心创新 1:基于凸优化理论推导出了 Focal Loss 的无监督版本,在无标签的推断阶段也能实现对高不确定性目标的自适应加权。
-
核心创新 2:设计了语义感知的法向量场约束(Semantic-aware Normal Field Constraint),利用高置信度的语义线索来维持局部几何一致性。
-
核心创新 3:构建了“空间-语义”互补的闭环反馈机制,使得鲁棒的语义预测能优化空间理解,反之亦然。
-
💡 二、 核心概念“剥洋葱” (Concept Demystification)
-
双重不确定性 (Dual Uncertainty)
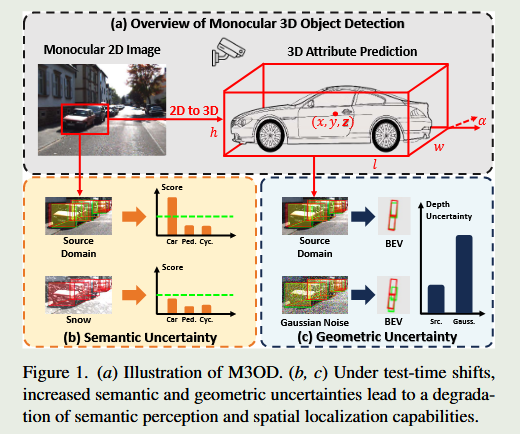
- 通俗解释:想象你在大雾天开车,前方隐约有个黑影。你面临两个问题:第一,“这黑影是行人还是路牌?”(这是语义不确定性);第二,“这玩意离我到底有5米还是10米?”(这是几何不确定性)。单目3D检测本质上就是在单视角下解这个病态问题,而 DUO 的核心就是同时消除这两种“看不清”的焦虑。
-
无监督凸Focal Loss (Unsupervised Convex Focal Loss)
- 通俗解释:传统的 Focal Loss 像是一个带标准答案的错题本,专门逼着模型去死磕那些“做错的难题”。但在测试阶段(TTA),我们手里根本没有标准答案(真实标签)。作者通过极其硬核的数学推导,把 Focal Loss 改造成了“无字天书”版本——即使没有正确答案,模型也能自动识别出自己对哪些目标的预测是“摇摆不定”的,并强行给自己加练。
-
语义感知的法向量场约束 (Semantic-Aware Normal Field Constraint)
- 通俗解释:这招叫“以长补短”。当模型对目标的“深度/距离”拿捏不准时,它可能会把一辆平整的汽车表面预测得坑坑洼洼。但这套机制会告诉模型:“既然你现在很确信这是一个车门(语义置信度高),那它的物理表面就必须是平滑连续的!”相当于用明确的“身份信息”去强行拉平扭曲的“空间几何结构”。
🔍 三、 章节深度拆解 (Section-by-Section Deep Dive)
1. 引言 (Introduction)
-
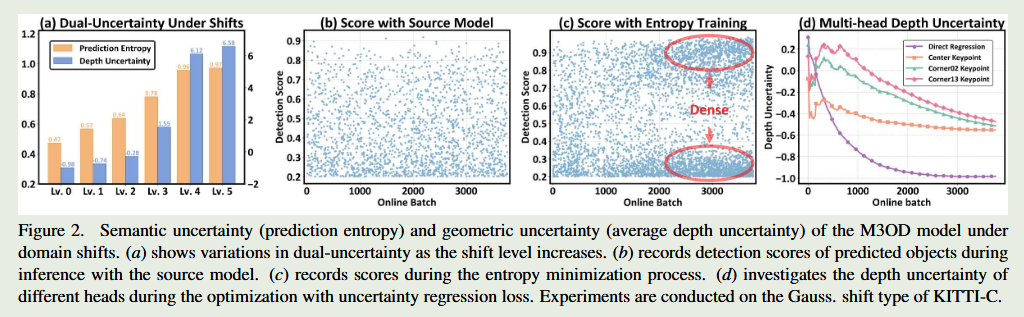
关键点: 点明现有 TTA 方法在 2D 到 3D 迁移中的水土不服,引出 M3OD 特有的语义与几何双重不确定性。文章开篇展示了 DUO 框架在不同偏移程度下,能显著压制预测熵(Entropy)和深度不确定性。
-
总结: 破题立意,一针见血地指出了 M3OD 在域适应中的核心痛点,为后续的双分支联合优化结构奠定了坚实的逻辑基础。
2. 相关工作 (Related Work)
-
关键点: 梳理了单目3D检测的发展脉络(从基于几何先验到深度估计驱动),以及测试时自适应(如基于熵最小化或伪标签的方法)的现状与局限性。
-
总结: 明确了本文所处的生态位——填补了现有 TTA 范式在 M3OD 任务中无法联合处理空间模糊性与类别模糊性的理论空白。
3. 方法 (Dual Uncertainty Optimization)
-
关键点: 这是全文最硬核的篇章,发力点在损失函数端与几何约束端。
-
首先,构建无监督的 Focal Loss。利用反函数定理和共轭关系,将原始监督损失重构,使其能在推断阶段仅依赖预测概率 $p$ 及其雅可比矩阵进行无监督梯度优化。
-
其次,引入法向量一致性约束。结合像素级语义置信度,对局部区域的三维点云法向量进行空间正则化。
-
-
总结: 这一章是 DUO 的心脏。数学推导极为优雅,通过严密的凸优化理论解决了 TTA 无标签的死穴,同时巧妙地建立了语义与几何的互补反馈环路。
4. 实验 (Experiments)
-
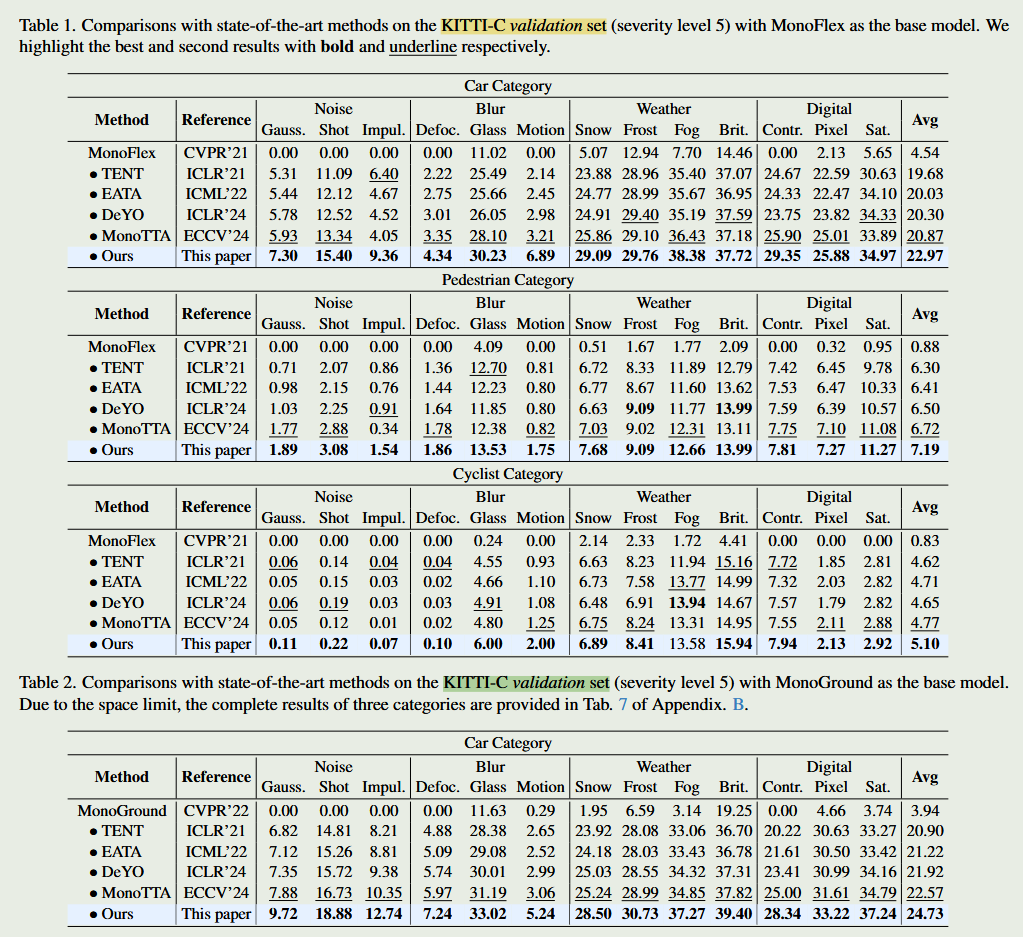
关键点: 在 KITTI-C 等数据集上验证了多种域偏移(如高斯噪声、恶劣天气等)。DUO 在各个偏移场景下的检测精度(mAP)均显著碾压现有的 TTA Baseline。详实的消融实验清晰证明了无监督 Focal Loss 和法向约束的独立贡献。
-
总结: 实验极其扎实,不仅证明了“能work”,更通过详细的曲线(如不同偏移等级下的不确定性对比)剖析了“为什么能work”,使整个故事形成了完美的闭环。
5. 结论 (Conclusion)
-
关键点: 重申 DUO 作为首个针对 M3OD 双重不确定性的 TTA 框架的价值,并强调了其在真实域偏移中的优越表现。
-
总结: 简明扼要地收尾,拔高了该研究在自动驾驶安全关键场景下实际部署的工程意义。
⚖️ 四、 专家级锐评与启示 (Critical Evaluation & Future Work)
-
硬核优势 (Strengths):
-
理论优雅性拉满:本文最大的闪光点在于对 Focal Loss 的无监督凸化重构。没有停留在工程上的“缝缝补补”,而是从数学底层打通了无标签自适应学习的路径。
-
逻辑自洽的闭环设计:“用确定的语义去约束几何,用清晰的几何去反哺语义”,这种多粒度的特征协同与场景拓扑正则化思想非常深刻,真正抓住了单目视角下 3D 表征极易坍塌的病态本质。
-
-
潜在局限 (Weaknesses/Limitations):
-
计算开销与实时性博弈:TTA 方法本质上是在测试阶段引入了额外的梯度更新。对于自动驾驶这种对延迟极度敏感(Latency-sensitive)的场景,DUO 在线优化的计算开销可能会成为其实际落地的阿喀琉斯之踵。
-
极端长尾场景的鲁棒性:如果测试域出现了强烈的语义分布外(OOD)对象(例如从未见过的异形车),模型可能无法产生高置信度的语义线索,导致法向量约束直接失效,进而打破双分支的互补循环。
-
-
后续研究方向 (Future Directions):
-
免优化的单次前向 TTA (Optimization-Free TTA):探索如何将 DUO 中极其有效的双重不确定性先验进行蒸馏,或者内化到网络的前向传播中,避免测试时的在线梯度反传,从而满足车载芯片的实时性要求。
-
引入时序几何约束:目前的法向量场约束仅停留在单帧内部的局部几何关系。未来可结合连续帧的自运动(Ego-motion)和多视图几何,构建更具全局拓扑一致性的时空正则化模型。
-
🏷️ 五、 知识库标签 (Tags)
#单目3D目标检测(M3OD) #测试时自适应 (Test-Time Adaptation) #自动驾驶鲁棒性 #无监督凸优化 #双重不确定性 (Dual Uncertainty) #几何与语义协同